ViPFormer: Efficient Vision-and-Pointcloud Transformer for Unsupervised Pointcloud Understanding
2023 IEEE International Conference on Robotics and Automation (ICRA2023)
Hongyu Sun, Yongcai Wang*, Xudong Cai, Xuewei Bai, Deying Li
School of Information, Renmin University of China, Beijing, 100872


Overview
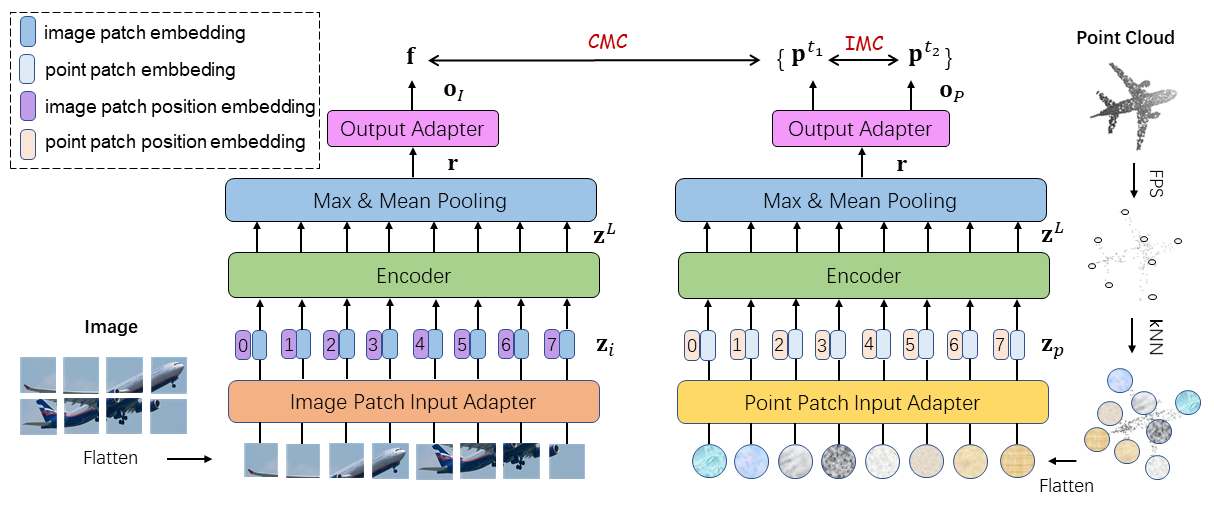
digms for point cloud processing to alleviate the limitation of expensive manual annotation and poor transferability of supervised methods. Among them, CrossPoint follows the contrastive learning framework and exploits image and point cloud data for unsupervised point cloud understanding. Although the promising performance is presented, the unbalanced architecture makes it unnecessarily complex and inefficient. For example, the image branch in CrossPoint is ∼8.3x heavier than the point cloud branch leading to higher complexity and latency. To address this problem, in this paper, we propose a lightweight Vision-and-Pointcloud Transformer (ViPFormer) to unify image and point cloud processing in a single architecture. ViPFormer learns in an unsupervised manner by optimizing intra-modal and cross-modal contrastive objectives. Then the pretrained model is transferred to various downstream tasks, including 3D shape classification and semantic segmentation. Experiments on different datasets show ViPFormer surpasses previous state-of-the-art unsupervised methods with higher accuracy, lower model complexity and runtime latency. Finally, the effectiveness of each component in ViPFormer is validated by extensive ablation studies. The implementation of the proposed method is available at https://github.com/auniquesun/ViPFormer.
Contributions
We propose ViPFormer, handling image and point cloud data in a unified architecture, simplifies the model complexity, reduces running latency and boosts overall performances for unsupervised point cloud understanding.
We show that ViPFormer can be generalized better to different tasks by simultaneously optimizing intra-modal and cross-modal contrastive objectives.
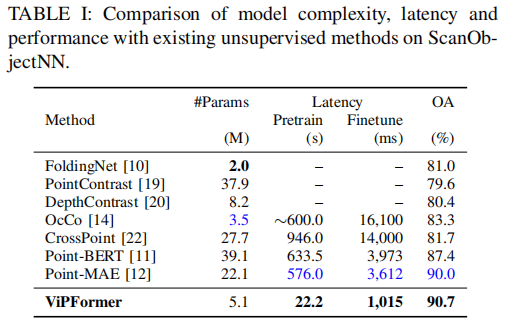
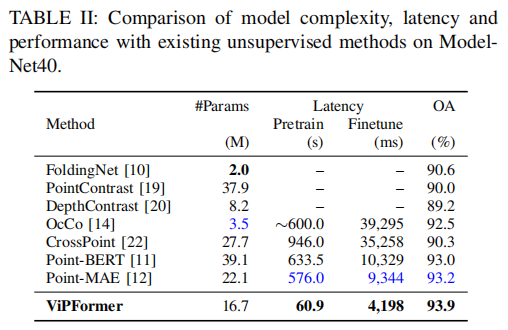
The proposed method is validated on various downstream tasks, e.g., it achieves 90.7% classification accuracy on ScanObjectNN, leading CrossPoint by 9%, and surpassing the previous best performing unsupervised method by 0.7% with ∼77% fewer parameters. Similarly, ViPFormer reaches a 93.9% score on ModelNet40, outperforming the previous state-of-the-art method and reducing the number of parameters by 24%.
We conduct extensive ablation studies to clarify the advantages of the architecture design, contrastive optimization objectives, and unsupervised learning strategy
Evaluations
Ablation Studies
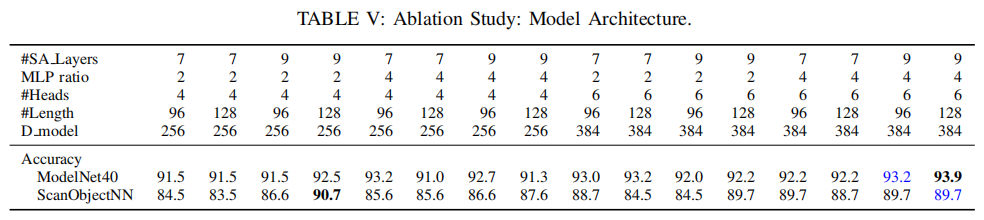
Architecture. The controlled variables of ViPFormer architecture are the number of self-attention layers (#SA Layers), the widening ratio of the MLP hidden layer (MLP ratio), the number of attention heads (#Heads), the sequence length (#Length) and the model dimension (D model). For different architectures, the accuracy of the pretrain-finetune scheme is reported on ModelNet40 and ScanObjectNN, respectively, shown in Tab. V. The overall trend is the larger the model, the better the performance. We choose the best performing architecture to compare with other methods.
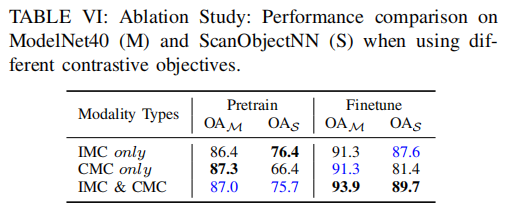
Contrastive Optimization Objectives. The effectiveness of proposed IMC and CMC contrastive objectives are evaluated by training ViPFormer in three modes: i) only use IMC, ii) only use CMC, and iii) use IMC and CMC together. The experiments are conducted on different learning stages (Pretrain vs. Finetune) and different datasets (ModelNet40 vs. ScanObjectNN). The results are shown in Tab. VI. Apparently, the combination of IMC and CMC optimization objectives significantly improves the model performance for target tasks across different datasets.
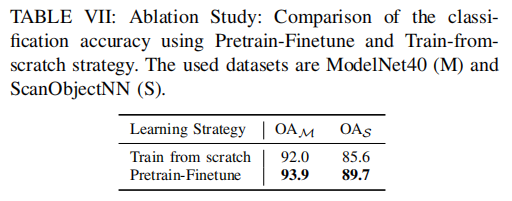
Learning Strategies. The differences between two kinds of learning strategies, Train from scratch and Pretrain-Finetune, are also investigated. As Tab. VII shows, The Pretrain-Finetune strategy outperforms Train from scratch by 1.9% and 4.1% on ModelNet40 and ScanObjectNN, respectively. The results indicate the initialization provided by the pretrained ViPFormer really helps the model find better directions and solutions in downstream tasks.
Visualization
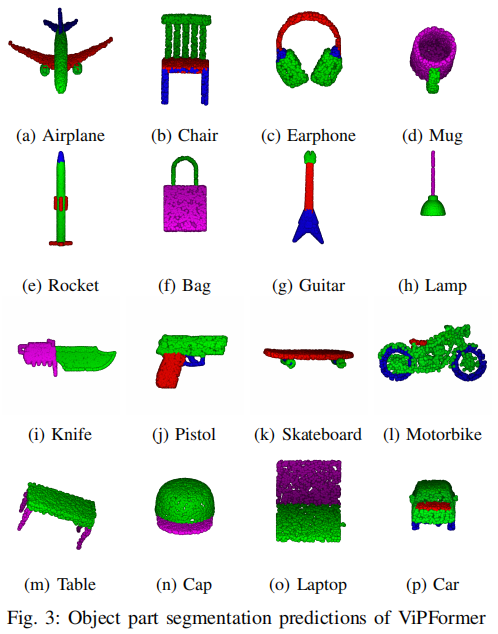
3D object segmentation
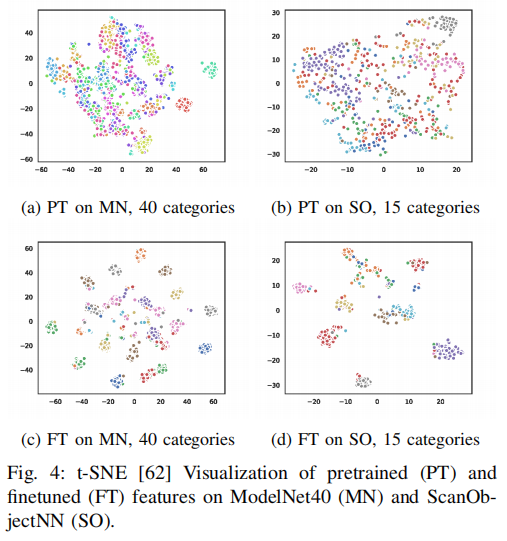
Feature Distribution
BibTex
xxxxxxxxxx111@INPROCEEDINGS{10160658,2 author={Sun, Hongyu and Wang, Yongcai and Cai, Xudong and Bai, Xuewei and Li, Deying},3 booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)}, 4 title={ViPFormer: Efficient Vision-and-Pointcloud Transformer for Unsupervised Pointcloud Understanding}, 5 year={2023},6 volume={},7 number={},8 pages={7234-7242},9 keywords={Point cloud compression;Solid modeling;Runtime;Three-dimensional displays;Shape;Semantic segmentation;Manuals},10 doi={10.1109/ICRA48891.2023.10160658}11}Acknowledgment
This work was supported in part by the National Natural Science Foundation of China under Grants No. 61972404 and No. 12071478, and Public Computing Cloud, Renmin University of China.